DynSim program
DynSim is a program to make Dynamic Simulations of motion control systems and to do graphical processing of the results.
The model is a rotating mechanism comprising a drive (control system plus amplifier), a motor and a mechanical load linked to the motor by an elasticity (spring).
The electronic control has a position loop, a speed loop, an acceleration feed forward, and a jerk feed forward (jerk is the derivative of the acceleration).
The goal is to allow a better knowledge of the influence of the different parameters of the system on its dynamic behavior, the parameters can be modified by the user.
The parameters of the default model are based on a real system from the company I worked for.
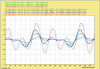
The program calculates 14 results saved in a curve array. The whole curve array can save up to 100 curves with a maximum of 5000 samples per curve.
The graphic module allows: (for details look at the help in the graphics module.)
- to copy curves to another location in the curve array.
- to superimpose up to 4 curves on the same diagram.
- to make different calculations on curves.
- etc.
The program needs following libraries:
ComboBox (Special, in the Libraries folder, ComboBox and ListBox)
Dialogs
IME
JavaObject
Manage (Special, in the Libraries folder, manages buttons)
NumericKeyboard (special, in the Libraries folder)
Phone
Reflection
A small help is included in the program.
It is a portation from the B4PPC DynSim project.
You find the zip file with the source code HERE, it's too big as an attachment.
It works only on 10'' tablets.
DynSim is a program to make Dynamic Simulations of motion control systems and to do graphical processing of the results.
The model is a rotating mechanism comprising a drive (control system plus amplifier), a motor and a mechanical load linked to the motor by an elasticity (spring).
The electronic control has a position loop, a speed loop, an acceleration feed forward, and a jerk feed forward (jerk is the derivative of the acceleration).
The goal is to allow a better knowledge of the influence of the different parameters of the system on its dynamic behavior, the parameters can be modified by the user.
The parameters of the default model are based on a real system from the company I worked for.
The program calculates 14 results saved in a curve array. The whole curve array can save up to 100 curves with a maximum of 5000 samples per curve.
The graphic module allows: (for details look at the help in the graphics module.)
- to copy curves to another location in the curve array.
- to superimpose up to 4 curves on the same diagram.
- to make different calculations on curves.
- etc.
The program needs following libraries:
ComboBox (Special, in the Libraries folder, ComboBox and ListBox)
Dialogs
IME
JavaObject
Manage (Special, in the Libraries folder, manages buttons)
NumericKeyboard (special, in the Libraries folder)
Phone
Reflection
A small help is included in the program.
It is a portation from the B4PPC DynSim project.
You find the zip file with the source code HERE, it's too big as an attachment.
It works only on 10'' tablets.
Attachments



Last edited: