Hello again
Continué con el programa que usa comunicación RS-485 y usé la instrucción CallSubPlus para deshabilitar la habilitación de transmisión. parte del codigo es este:
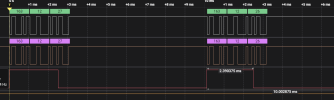
The result is variable, normally it deactivates in 2.49ms, other times in 2.51 and other times in any other value.
copia adjunta del analizador

The program contains much more code, I could understand that it is delayed but not that it is ahead.
This signal is important since depending on the length of the telegram I have to allocate enough time for all the Bits to be transmitted by RS-485
This is the plane of this communication.

Any suggestions or advice on this?
Thank you so much
Continué con el programa que usa comunicación RS-485 y usé la instrucción CallSubPlus para deshabilitar la habilitación de transmisión. parte del codigo es este:
The intention is that 3ms after starting to send information, the RS-485 will switch to reception mode.' Activa Transmision.
En_Tx_Encoder.DigitalWrite(True)
' Envia los Datos
PS1.Write(B)
' DesActiva Transmision despues de 3 ms
CallSubPlus("EN_TX1_Off",3,0)
The result is variable, normally it deactivates in 2.49ms, other times in 2.51 and other times in any other value.
copia adjunta del analizador
The program contains much more code, I could understand that it is delayed but not that it is ahead.
This signal is important since depending on the length of the telegram I have to allocate enough time for all the Bits to be transmitted by RS-485
This is the plane of this communication.
Any suggestions or advice on this?
Thank you so much